
Documentation: Added MMMPlayer tutorial
Showing
- etc/doxygen/images/GuiArms.png 0 additions, 0 deletionsetc/doxygen/images/GuiArms.png
- etc/doxygen/images/GuiWithKinematicUnit.png 0 additions, 0 deletionsetc/doxygen/images/GuiWithKinematicUnit.png
- etc/doxygen/images/GuiZero.png 0 additions, 0 deletionsetc/doxygen/images/GuiZero.png
- etc/doxygen/images/KinematicUnitChoseRobotModel.png 0 additions, 0 deletionsetc/doxygen/images/KinematicUnitChoseRobotModel.png
- etc/doxygen/images/KinematicUnitOpen.png 0 additions, 0 deletionsetc/doxygen/images/KinematicUnitOpen.png
- etc/doxygen/images/KinematicUnitSettings.png 0 additions, 0 deletionsetc/doxygen/images/KinematicUnitSettings.png
- etc/doxygen/images/KinematicUnitStart.png 0 additions, 0 deletionsetc/doxygen/images/KinematicUnitStart.png
- etc/doxygen/images/converterGui.png 0 additions, 0 deletionsetc/doxygen/images/converterGui.png
- etc/doxygen/pages/MMMTutorial.dox 292 additions, 0 deletionsetc/doxygen/pages/MMMTutorial.dox
- etc/doxygen/pages/Tutorials.dox 1 addition, 2 deletionsetc/doxygen/pages/Tutorials.dox
etc/doxygen/images/GuiArms.png
0 → 100644
{kind=link}
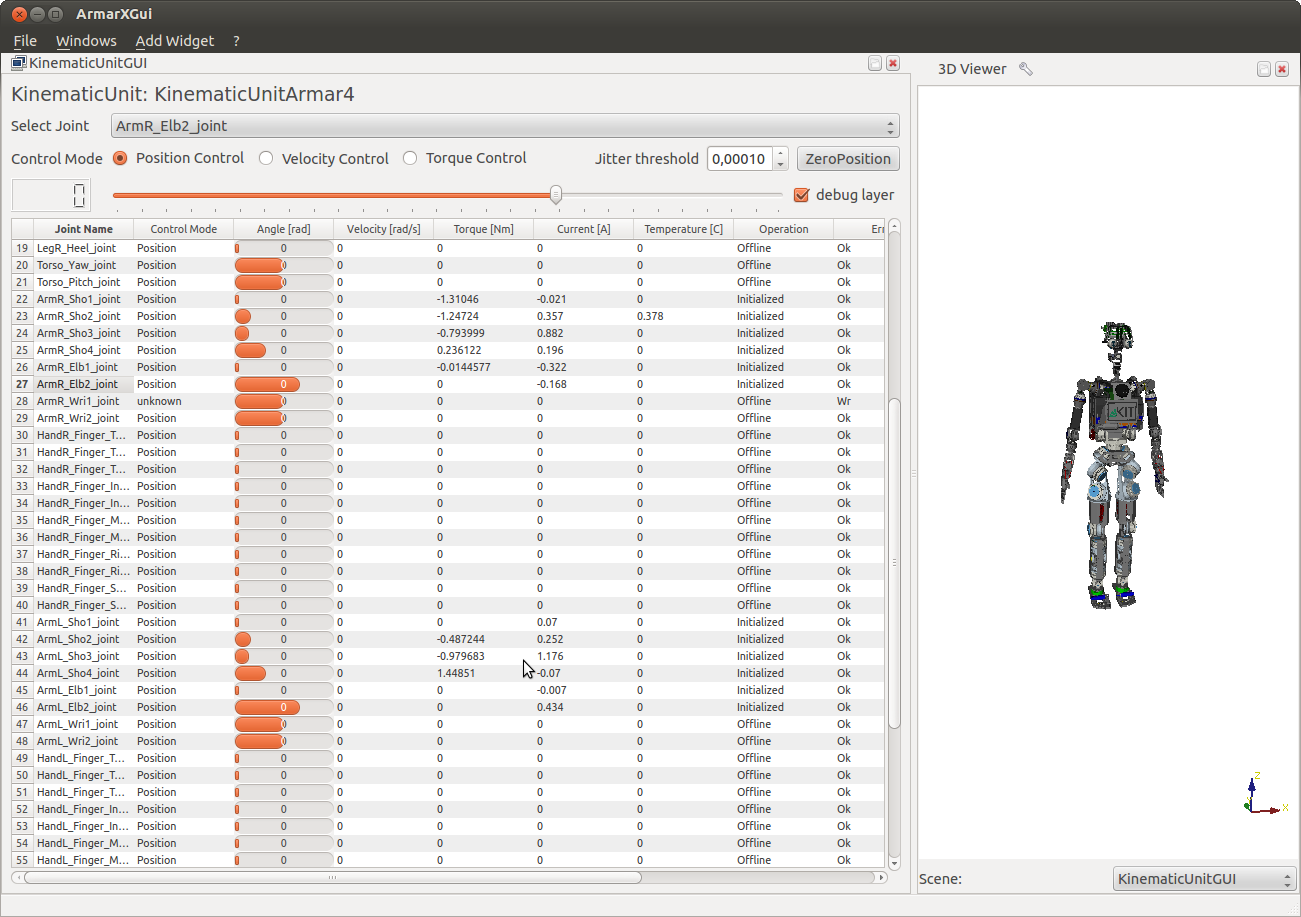
259 KiB
etc/doxygen/images/GuiWithKinematicUnit.png
0 → 100644
{kind=link}
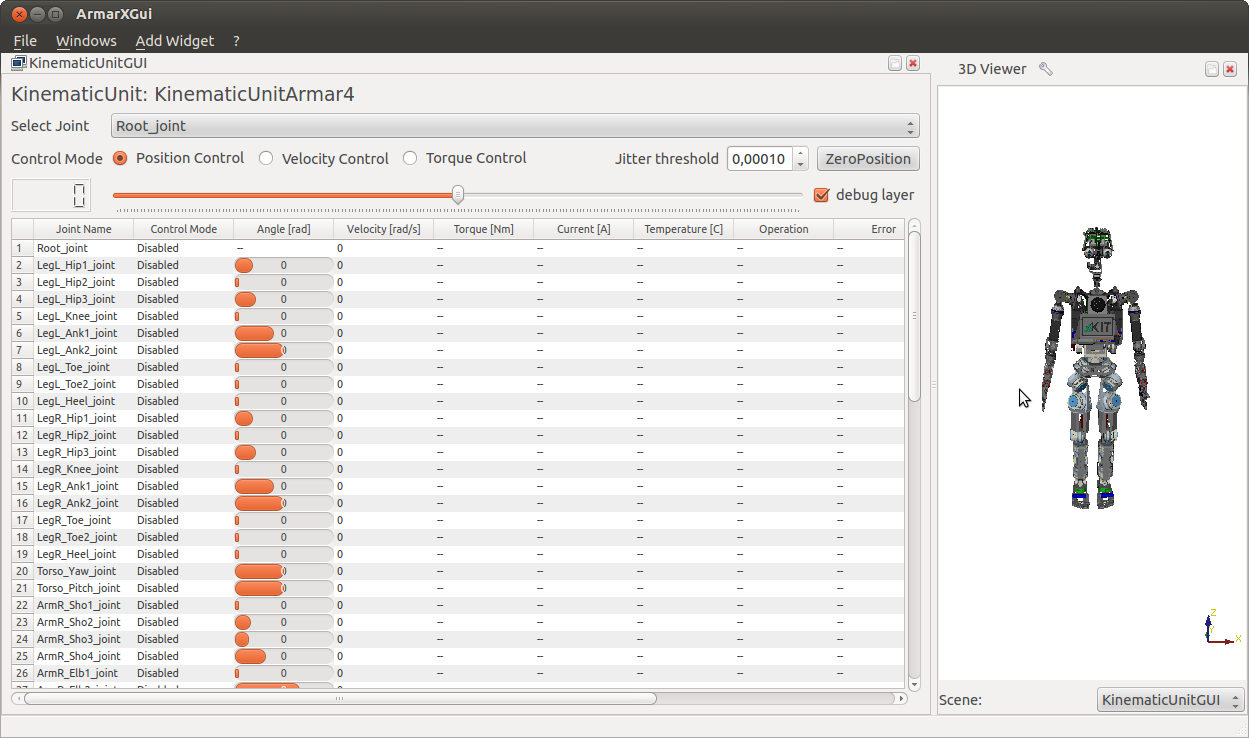
180 KiB
etc/doxygen/images/GuiZero.png
0 → 100644
{kind=link}
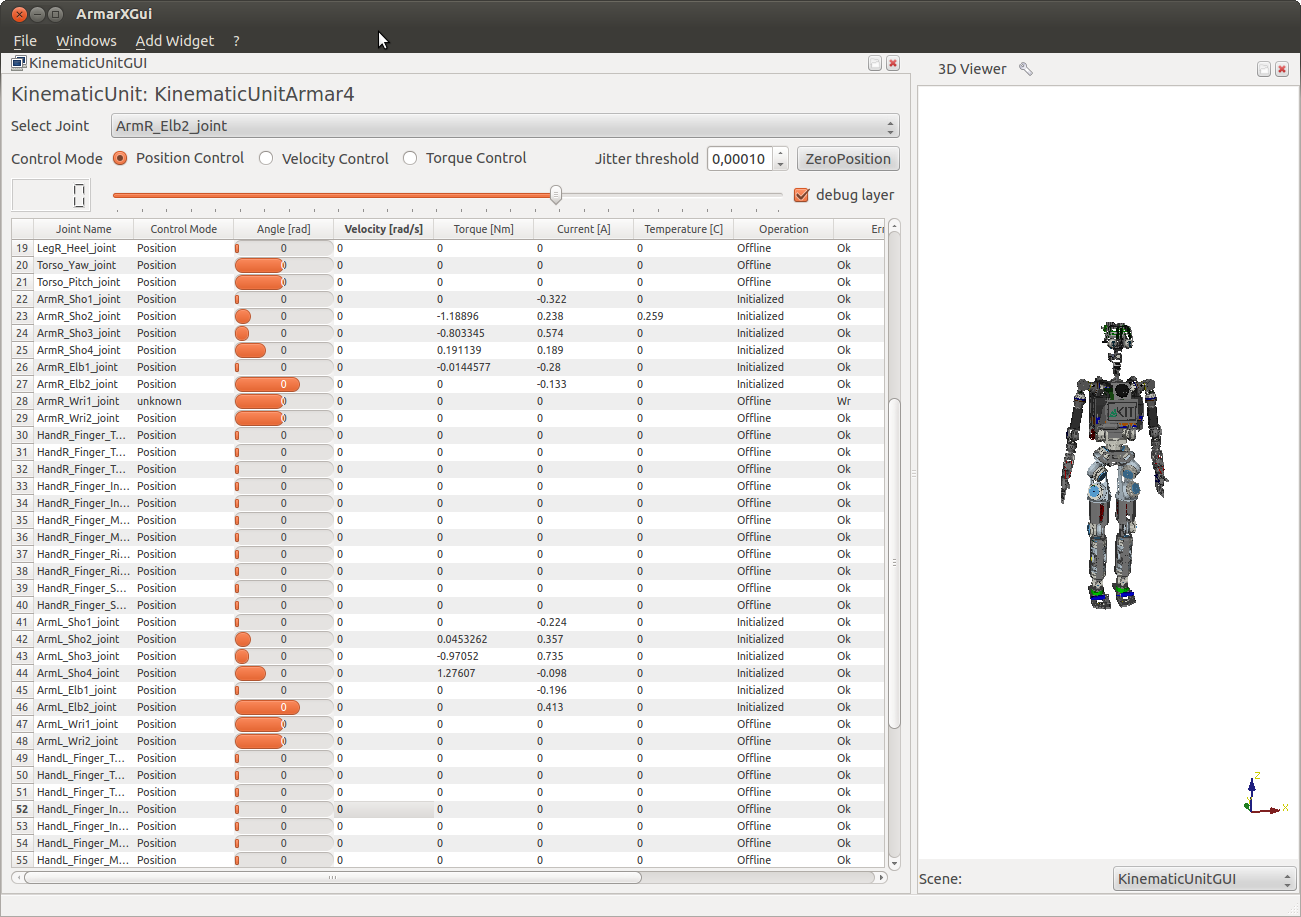
259 KiB
{kind=link}
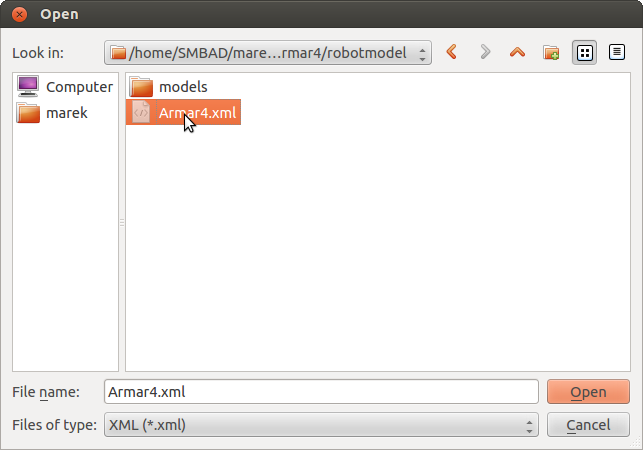
37.1 KiB
etc/doxygen/images/KinematicUnitOpen.png
0 → 100644
{kind=link}

57.6 KiB
etc/doxygen/images/KinematicUnitSettings.png
0 → 100644
{kind=link}

38.5 KiB
etc/doxygen/images/KinematicUnitStart.png
0 → 100644
{kind=link}
13.9 KiB
etc/doxygen/images/converterGui.png
0 → 100644
{kind=link}
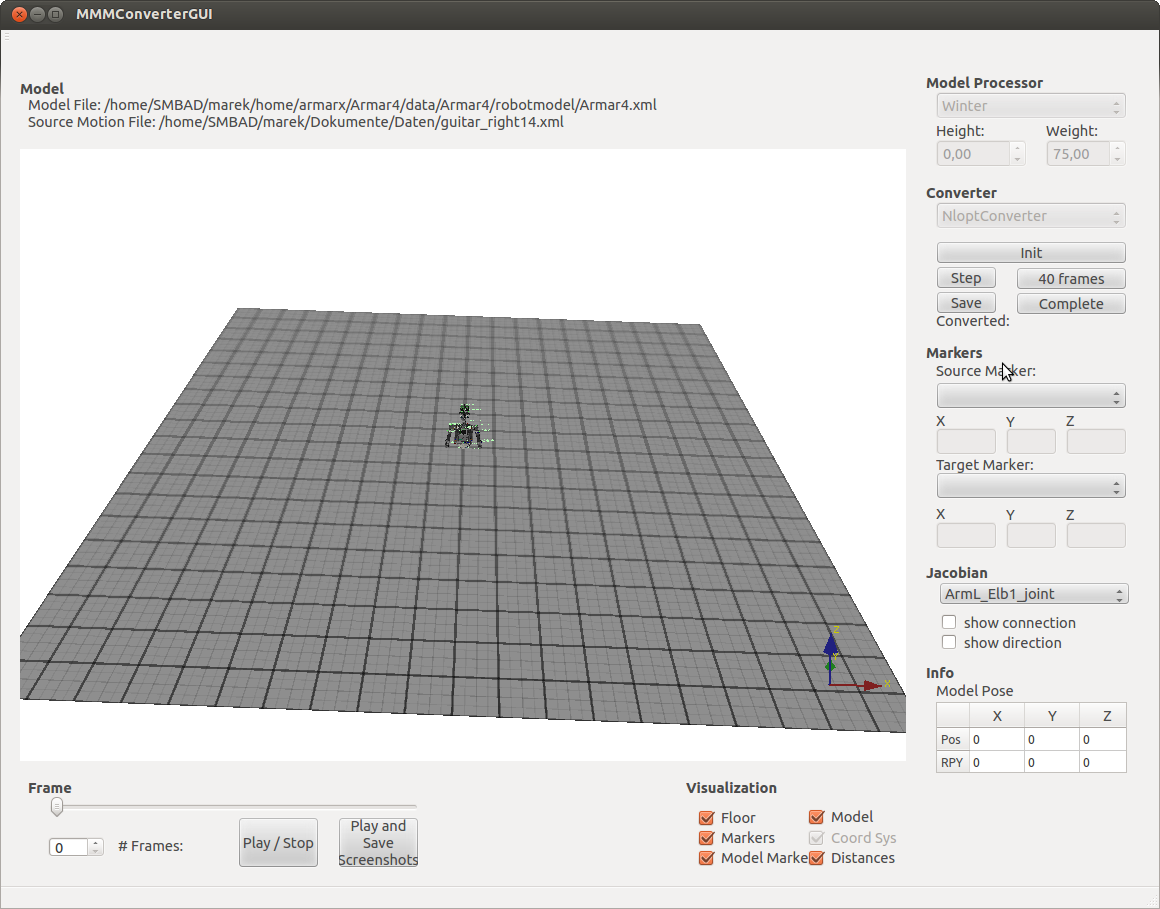
236 KiB
etc/doxygen/pages/MMMTutorial.dox
0 → 100644