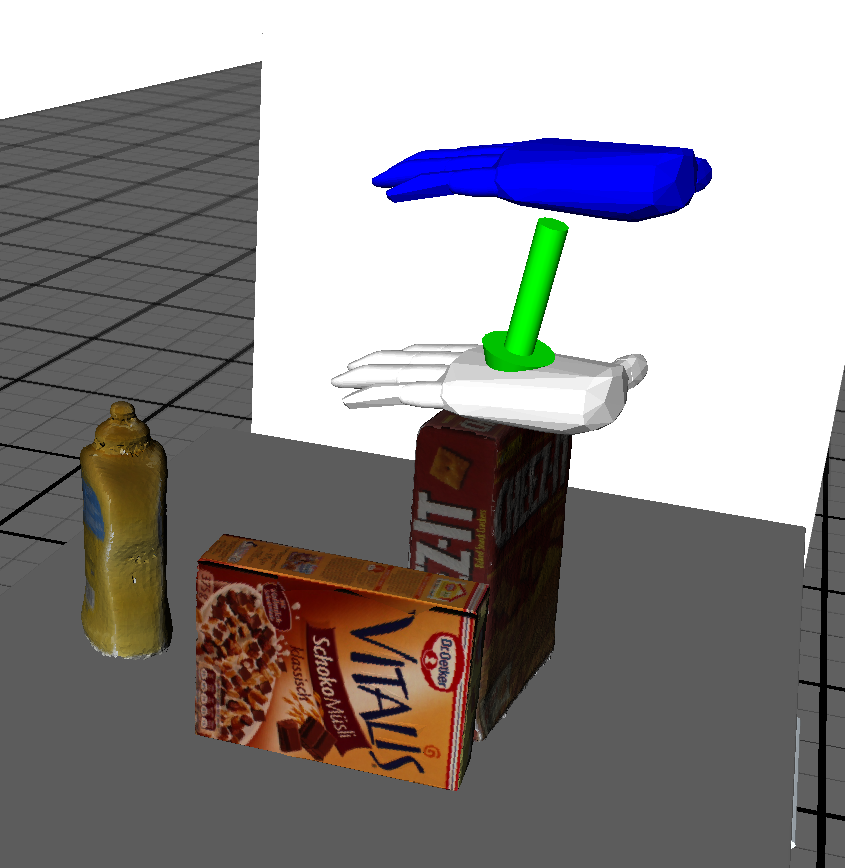
visualization of known grasps: prepose and approach vector
Code
Review changes
Check out branch
Download
Patches
Plain diff
Expand sidebar
visualization of known grasps: prepose and approach vector
Fabian Reister
requested to merge
feature/known-grasp-preposes
into
master
Dec 05, 2024
Overview
0
Commits
1
Pipelines
1
Changes
2
/cc
@meixner
@hyseni
@ucesn_gaukel
Merge request reports
Loading